Préhenseurs

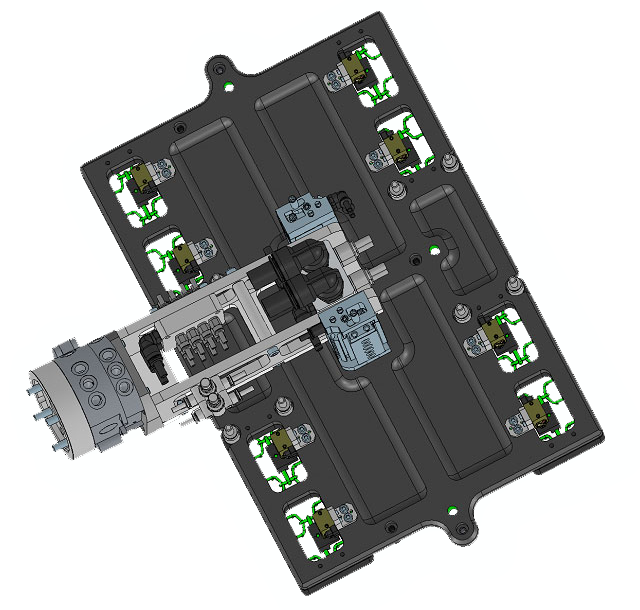
CONCEPTION DE PRÉHENSEURS POUR ROBOT
 Guignard Robotisation offre désormais, en complément des ilots robotisés, un service dédié à la préhension. Nous sommes en effet, de plus en plus sollicités pour réaliser ce type d'application, spécifique à des applications sur ilots robots existants ou autres.
Guignard Robotisation offre désormais, en complément des ilots robotisés, un service dédié à la préhension. Nous sommes en effet, de plus en plus sollicités pour réaliser ce type d'application, spécifique à des applications sur ilots robots existants ou autres.
Ce service , dont l'organisation est calquée sur notre procédure "ilot" se déroule selon les étapes suivantes : un chef de projet dédié prend en charge la demande, réalise et respecte un cahier des charges établi conjointement avec le client.
Durant toute la durée du projet, le client est systématiquement informé et/ou sollicité par rapport aux solutions proposées et à l'avancement de son projet.
L'ensemble de la conception est réalisée en interne (choix des matériaux, traçabilité des matières (fourniture de certificat matière), choix des composants) en fonction des impératifs clients.
Nous assurons le montage, le câblage (pneumatique et/ou électrique), nous procédons également aux diverses phases d'essais en locaux, jusqu'au démarrage chez le client (avec programmation robot si besoin).
La méthode qui a fait notre réputation (suivi, organisation, sérieux, efficacité) est ici fidèlement appliquée.
FONCTIONNEMENT DE LA PRÉHENSION PAR ROBOT
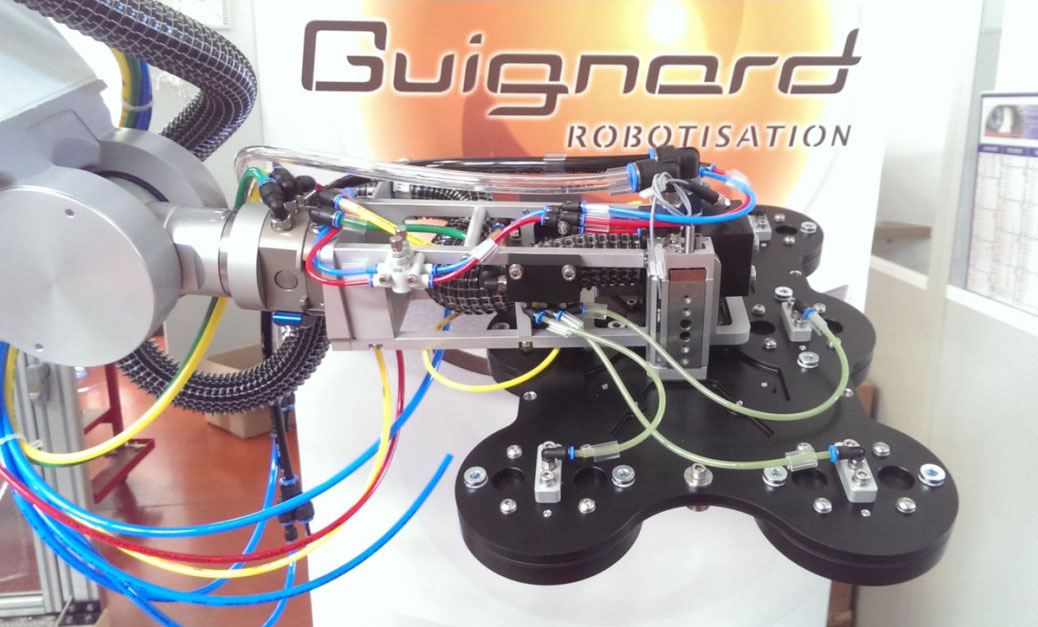 Plusieurs types de fonctionnement par préhension sont possibles sur les robots que nous concevons :
Plusieurs types de fonctionnement par préhension sont possibles sur les robots que nous concevons :
- préhension par venturi (aspiration)
- préhension par pompe à vide (aspiration)
- pince de préhension (prise intérieure et extérieure, avec mors de forme adaptés)
- aimantation
- aiguille
- givre
- capteur inductif, laser, vaccuostat